
Fine grained Occupancy estimatoR using Kinect (FORK)
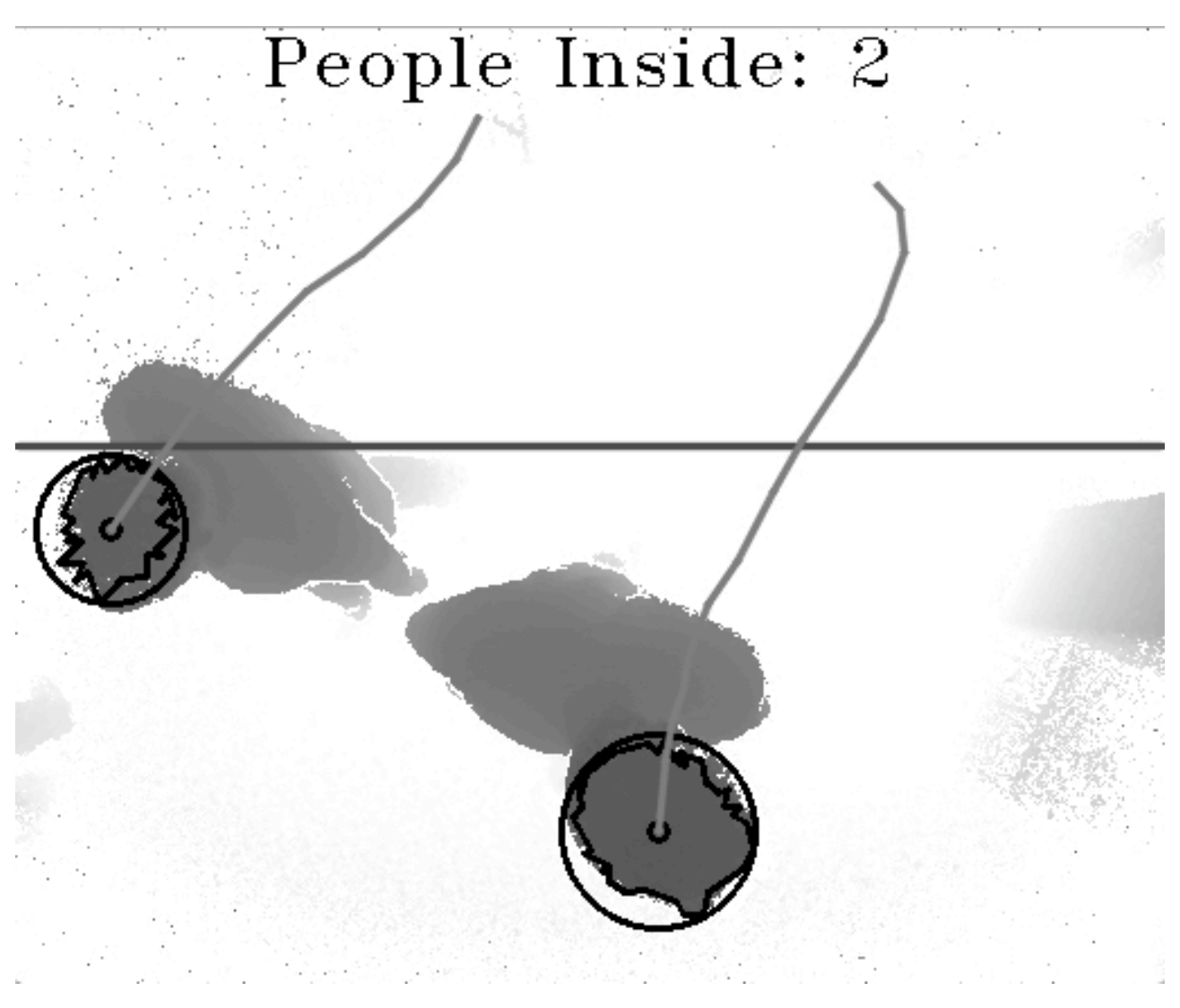
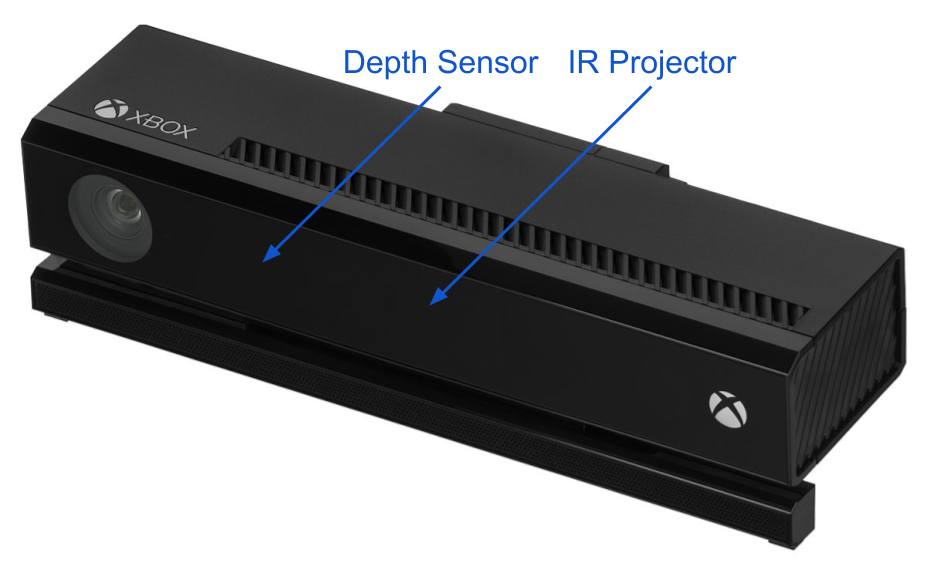
This project focused on developing a prototype system to explore the potential of using depth sensors to detect, estimate, identify, and track occupants in buildings. The FORK system uses a cheaper and lower power ARM processor for real-time processing, instead of using a high-power and high-cost computer, like an XBOX or an Intel Core i7 based machine. Unlike other camera based approaches, FORK is much less privacy invasive (even if the sensor is compromised) through its use of depth sensing and local processing.
My Contributions
- Researched/sourced the embedded platform with USB 3.0 support and that was capable of real-time processing
- Packaged the dependencies and environment needed for fast Debian deployment
- Created the C++ XMPP Mortr.io interface for background data offloading
- Created tools to remotely monitor and control multiple FORK nodes
Embedded Hardware
We settled on an ODROID XU4, which hosts a Samsung Exynos 5 Octa 5422 SoC. This Samsung SoC was the deciding factor in choosing the XU4 due its USB 3.0 support and its powerful Mali-T628 MP6 GPU.

Debian Packages


